
“数智领航”系列 | 关于手持SLAM三维激光扫描仪你需要了解的事情
Simultaneous Localization and Mapping,即时定位与地图构建。三个关键词:即时、定位、地图构建。
有地图的话,我的位置与姿态都可以获得,进而扫描场景,那么既然有地图,我还要扫描有何用。
有定位的话,那么这个定位从哪里来呢,在外场的时候,我们可以依赖GPS+IMU。但是在商场、地下管廊、没有GPS信号的区域呢,这个时候我就需要地图数据了。
所以,上述问题类似于先有鸡还是先有蛋的问题了。
那么这个时候,SLAM的“即时”就可以解决这个问题,通俗解释就是我可以边定位,边地图构建。
比如你要去一个陌生的地方逛商场。首先乘坐网约车到达门口,然后下车拍照打卡,对商场的入口处及周边有初步认识之后,进行健康登记,进入商场。每逛完一个门店后,都会跟上一家门店联系起来(假如你记忆力超群),比如他们之间的距离,位置关系,以及你现在所处的位置等等,依次浏览所有门店,最后对整个商场的轮廓有了一个整体的认识。
第一:因为矿洞里面没有GPS信号,很难去使用RTK测量;
第二:矿洞里面光照条件不好,使用全站仪视线不佳;
第三:有些矿洞很狭窄,纵横交错,全站仪效率低。
由于手持SLAM设备可以边走边测,无需GPS信号,也不受到光照的影响,因此特别适合于矿洞、地质溶洞等。
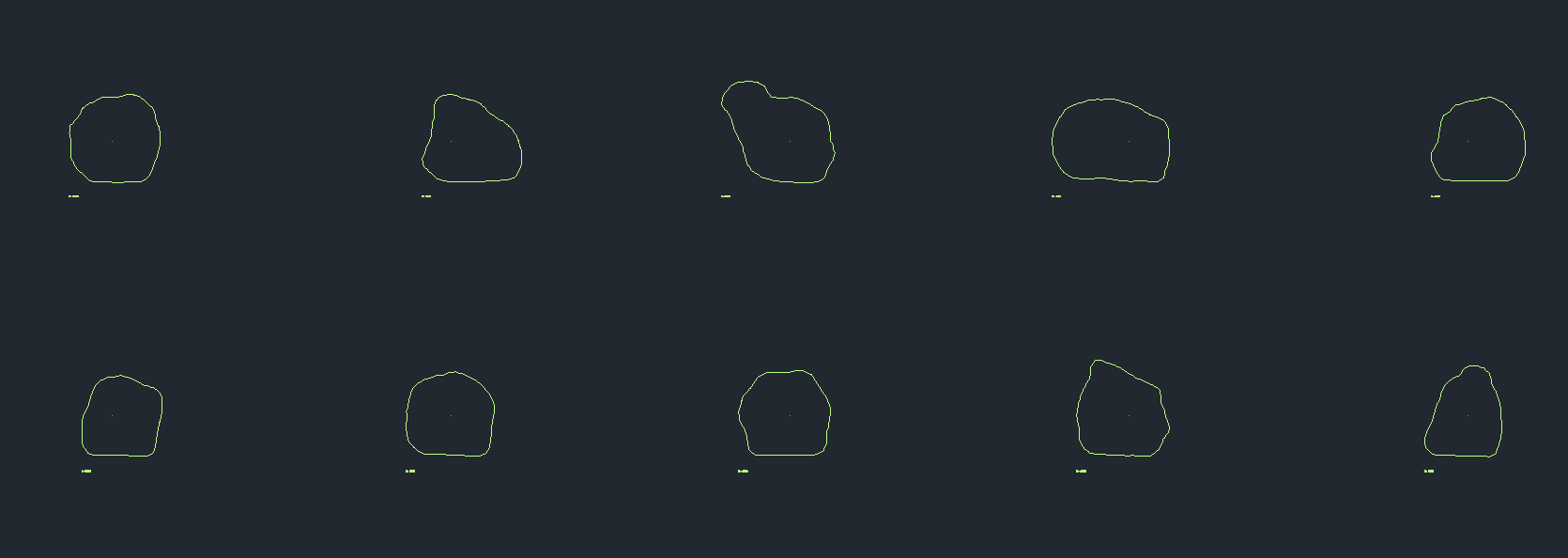
对于矿洞的成果,有矿洞平面图,断面图,体积,三维模型等。


1)传统作业方式耗时费力,在搬站时需要多人协作,外业采集工作效率低;
2)传统作业方式对人工的技术能力要求高;
3)传统技术针对遮挡场景的数据无法得到很好的满足;
4)传统技术无法及时判断出数据质量,若在后续内业工作中发现问题需要及时到现场补测;
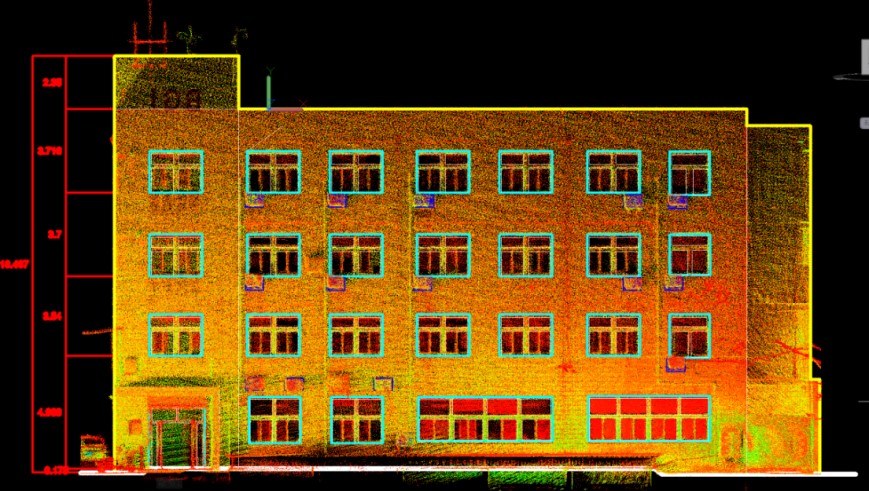
虽然倾斜摄影测量技术通过低空拍摄可以做立面测量,但是对于禁飞区和树木遮挡的区域,倾斜摄影测量就无法有效获取数据。
因此基于SLAM技术的最大优势在于,作业效率高,可快速获取立面数据,数据信息丰富(不仅是门窗,洞口,空调),只要扫描到的地方都可以进行测量,这样便于提高内业的效率。并且具有全景影像的设备可以辅助作业人员判断物体的材质,标识牌,文字等信息。
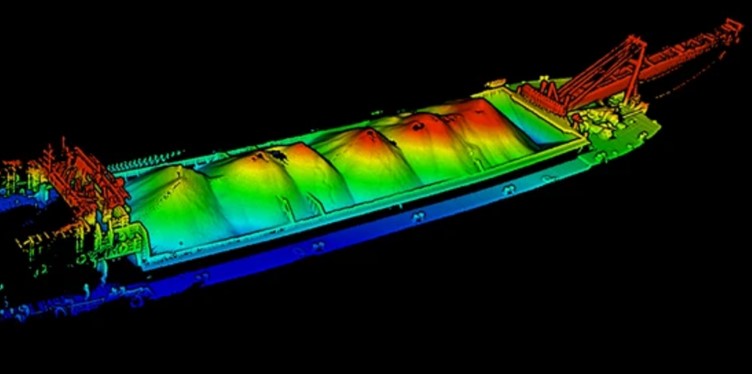
而SLAM技术可以不考虑信号,不考虑架站搬站,点密度超大(≥10000点/平方米)。无论是场内、场外、运砂船、堆料仓立面的体积,只要能够扫描到被测物体,那么基于点云的体积量测是十分方便的。
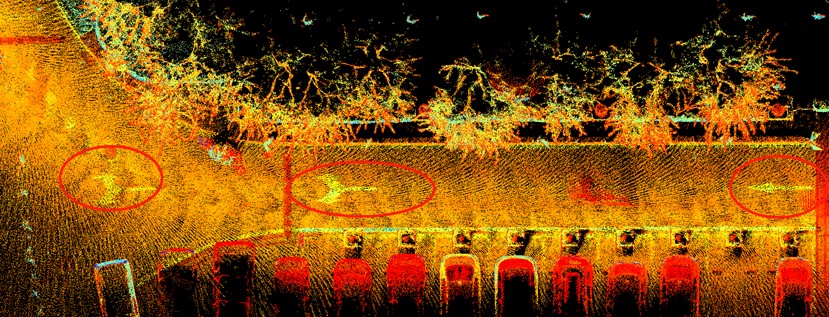
① 点云的分层现象
分层:在一个作业架次里面,对同一地方,不同时间扫描的点云之间的错层。
可以使用第三方软件,比如数字绿土的LiDAR360,用GPS时间来渲染点云,那么你可以发现,同一区域有不同颜色的点云,如果两种颜色的点云贴合的很好,那么说明点云分层几乎没有。
基本上点云越薄,点云质量越好,厚度薄的点云说明算法优秀。当然这种薄不是指对点云进行抽稀,压薄,平滑之后的点云。
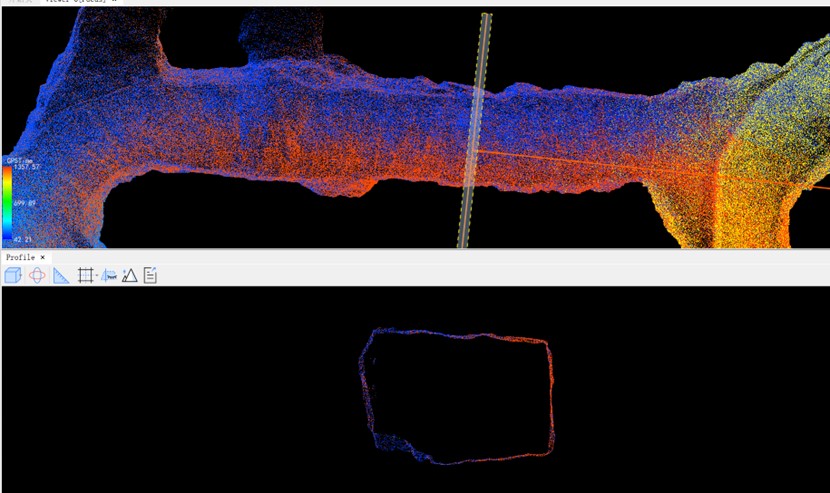
③?相对精度
相对精度,可以理解为尺寸精度,且验证相对精度量测时,一定要大于本身激光器的测距长度。
④ 绝对精度
目前市面上大多数的手持产品没有GPS设备,因此基于打点功能进行相对坐标到绝对坐标的转换。绝对精度的验证,需要在现场布设反射率靶标(比如3M反光贴)或者利用道路标示线充当检查点。
以上是主要验证点云精度的指标,点云精度也与SLAM算法息息相关。
由于激光器的不同,使用GPS也不一样。因此这里不做展开描述,因为性能会有很大的不同。比如由于GPS的加入,控制点可以不用布设(前提是有GPS信号),32线与16线激光雷达激光点频不一样(64W VS 32W),因此在描述物体时,32线效果更好。
① 稳定性
稳定性体现在数据的稳定性和遭受恶劣条件的稳定性(设备是否死机,设备是否不运转)。前提条件是要按照厂家的提示操作,按照规范进行采集。
② 人性化
设计简单易用,握持是否舒适等。
③ 易维护
④ 易扩展
主要体现在是否可以车载,机载等。
⑤ 外观
当然我们还是回到核心的SLAM技术,需要考察厂家是否有过SLAM技术的积累,或者曾经出过SLAM设备,这样至少厂家拥有SLAM技术团队,可以很快的迭代算法,回应客户的需求。
同学们,今天就讲到这里啦!有需要提问的,可以在评论区留言哦~
本文由某某资讯网发布,不代表某某资讯网立场,转载联系作者并注明出处:http://huashicg.com/index.php?m=home&c=View&a=index&aid=445


